展示全部
近紅外DMD空間光調制器( 高損傷閾值NIR)
紫外高分辨率高速DMD空間光調制器(UV)
ViALUX計算成像用高速大數據吞吐量DMD空間光調制器
光纖耦合微透鏡陣列
定制微透鏡陣列/復眼透鏡
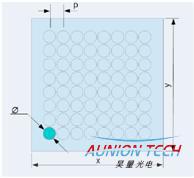
微透鏡陣列焦距檢測方法1,千分尺測量法西安工業大學通過透鏡焦距和透鏡鏡面半徑的理論關系,利用顯微鏡測量微透鏡陣列子單元的直徑并用千分尺測量矢高,從而完成焦距的測量,圖 1-1所示。圖1-1 平凸透鏡焦距示意圖對于一般的平凸型微透鏡陣列,利用顯微鏡和千分尺分別測量子單元直徑 Ф和矢高 h,計算其焦距為: (1-1)早期的微透鏡陣列制造常采用熔融光刻膠法制作,形成的是平凸面形的透鏡,利用該方法能完成相應的焦距測量。由于平凸透鏡焦距受凸面曲率半徑限制,使得該類型微透鏡陣列的應用受到較大的局限。另外,該檢測方法采用千分表接觸是測量微透鏡陣列的矢高,易造成微透鏡表面的 ...
微透鏡陣列和其實現的光束勻化簡介微透鏡陣列是由通光孔徑及浮雕深度為微米級的透鏡組成的陣列。它和傳統透鏡一樣,最小功能單元也可以是球面鏡、非球面鏡、柱鏡、棱鏡等,同樣能在微光學角度實現聚焦、成像,光束變換等功能,而且因為單元尺寸小、集成度高,使得它能構成許多新型的光學系統,完成傳統光學元件無法完成的功能。微透鏡陣列的結構從最小功能單元的排列方法可分為單排式、M*N排列、滿布式等,同時可分為單面陣列和雙面陣列。圖1:微透鏡陣列示意圖微透鏡陣列可分為折射型微透鏡陣列與衍射型微透鏡陣列兩類:折射型微透鏡(ROE)陣列:基于幾何光學的折射原理,光在兩種透明介質交界處(如空氣和玻璃),將向折射率高的區域彎 ...
機前放置一個微透鏡陣列組成。光束經過每個微透鏡后都會聚焦在一點,聚焦點的位置被能夠反應出光束的方向,然后反推出光的波前信息。下面的內容是模擬光束經過透鏡后聚焦的過程,然后簡單的敘述了兩種相位恢復的算法。模擬步驟1. 構建相位面,獲取焦面上的圖像,計算斜率2. 重建波前方法分為兩種,一種是區域法,一種是模型法。3. 對比重構之后的相位和輸入的相位面,對比結果構建相位面,計算質心,獲取斜率1、構建相位面數字化處理的方式多是無量綱的數據,因此默認量綱為a,假設為1um。一個連續的光斑,光強和相位面是連續的,這里將它離散,變成一個二維矩陣,單個像素的大小為a。相位面經過微透鏡陣列后聚焦到CCD陣列所在 ...
果三維物體與微透鏡陣列之間的距離較長,則獲取的三維物體的圖像質量會明顯下降。盡管可以使用與光場相機的位置相對應的多個光線采樣平面來解決這個問題,但是為了清晰地獲取三維對象的三維信息,需要在改變深度的同時多次采集圖像。換言之,使用光場技術無法一次清楚地獲取深度較深的三維對象的三維信息。由于有效獲取深度較深的三維信息需要花費大量時間,因此很難捕捉到人的運動等動態場景。這是實現基于電子全息的下一代三維電視系統面臨的嚴峻問題。技術要點:基于此,日本千葉大學的Hidenari Yanagihara和Tomoyoshi Ito等人提出一種不采用光場技術的實時電子全息系統,成功重建了一個人在現實世界空間中移 ...
iers)或微透鏡陣列,讓左右眼接收不同的視角,從而產生立體視覺效果。但是這種技術需要觀察者站在一個特定的位置,這限制了它的使用。當然,通過自動人眼追蹤技術可以緩解對觀察者位置的限制要求,但是這種技術還沒有普及開來。3)運動視差(Motion Parallax)運動視差需要投影許多個視圖,這樣,即使觀察者在顯示器前移動也能夠看到正確的視差(parallax)。不同視角的被投影密度需要確保能夠產生正確的立體信息,因此,每個瞳孔間距至少需要兩個視角。然而,為了實現從一個視角到另一個視角的平滑過渡,需要更大的視角密度。z佳視角密度取決于顯示器的確切配置和預期的觀察者距離,但數量大約為每度一個視角的量 ...
能的元件,如微透鏡陣列功能,反射鏡功能等。微透鏡功能的記錄和使用見圖2。本文將全息光學元件作為反射鏡使用,通過將同軸的準直平面波與同軸的曲率半徑為60mm的球面波在16um厚的光致聚合物(photopolymer)薄膜上干涉形成(兩束光的方向相反,從而生成反射模式全息圖)。記錄的全息圖在639nm、532nm、457nm下多色復用記錄(記錄裝置示意圖見附錄),用于彩色顯示。實驗結果:圖3A為做成可穿戴式的AR顯示器,圖3B和C分別為室內和室外的實驗結果。圖3D為AR顯示器各個模塊與一個US quarter硬幣的尺寸對比。附錄:(1) 經典pancake光學器件的原理。見下圖。a、顯示器(Dis ...
的 LFM,微透鏡陣列 (MLA) 放置在寬視場顯微鏡的原生像平面 (native image plane, NIP) 上,并且光學信號以欠采樣方式記錄在 MLA 后焦平面上。波動光學模型的發展,使得嚴重欠采樣的高頻空間信息可以通過對點擴散函數(PSF)求解卷積的方法得到一定程度的恢復,從而放寬空間和角度信息之間的權衡要求。當前不足:當前有兩個主要因素限制了 LFM 的更廣泛應用。首先,LFM 的空間信息的采樣模式是不均勻的。特別是在NIP附近,信息的冗余導致重建時產生嚴重的偽影。其次,體積重建采用波動光學模型的 PSF 解卷積。傳統 LFM 的 PSF 在橫向和軸向維度上都有空間變化,因此用 ...
異可能是由于微透鏡陣列相對于SPAD陣列的輕微錯位或微透鏡特性的局部變化造成的。表1總結了SS2的性能,并將其與其他的大畫幅科學相機進行了比較。SPAD相機由于其數字特性,理想的讀出噪聲為零,因此它們可以用單光子靈敏度執行廣域FLIM。與MCPs和基于光電陰極的探測器相比,他們的CMOS技術是可擴展的,健壯的和經濟的。在SPAD相機中,SS2采用了迄今為止較大的陣列尺寸,既能實現寬視場,又能實現高空間分辨率。表1 參數列表3.2 設備介紹SPAD5122是一個512×512像素的單光子雪崩二極管圖像傳感器。它可以使光子計數達到每秒10萬幀,讀出噪聲為零。 Global shut可以實現納秒級曝 ...
(SLM)或微透鏡陣列從一束激光產生多個激光焦點,這被認為是一種空間多路復用技術。多聚焦共聚焦拉曼光譜儀的重要組成部分是對來自多個激光聚焦的所有拉曼光譜的平行檢測。使用微透鏡陣列來產生多個激光聚焦。纖維束被用來從激光聚焦陣列中收集所有的拉曼信號,然后以線性堆疊的形式傳輸到光譜儀的入口狹縫。采用多通道電荷耦合器件(CCD)攝像機對所有的拉曼光譜進行了檢測。使用一對掃描鏡產生分時的多個激光聚焦,第三個振鏡通過光譜儀的入口狹縫將每個聚焦的拉曼信號同步投射到多通道CCD相機上。每個光譜被放置在相機的不同像素行上,以避免附近光譜通道之間的重疊和串擾。多聚焦共聚焦拉曼光譜儀在分析吞吐量或成像速度上比傳統的 ...
器之間插 入微透鏡陣列來實現的。傳感器獲取復合信息,該復合信息允許識別檢測到的光來自 的物點和透鏡點。然而,由于結構(使用微透鏡陣列)和基本(高斯J限)原因,圖像分辨率與獲 得的方向信息成反比地降低;因此,在基于簡單強度測量的設備中,在衍射J限下的全光成像 被認為是無法實現的。圖(a)傳統全光成像(PI)設備的方案:物體的圖像聚焦在微透鏡陣列上,而每個微透鏡將主透鏡 的圖像聚焦在后面的像素上。這種配置需要與方向分辨率的增益成比例的空間分辨率的損失;(b)顯 示了相關全光成像(CPI)設置的方案,其中方向信息是通過將物體聚焦的傳感器檢索到的信號與收集 光源圖像的傳感器相關聯而獲得的。為了實現全光 ...
或 投遞簡歷至: hr@auniontech.com